Problem Set
NBPhO 2026
4. Rod and Bead 8 pts
A bead slides on a frictionless rod that rotates about a horizontal axis; identify the bounded circular trajectory generated by gravity, stabilise it with a Hooke spring, and reverse-engineer the parameters of a rotating electric field from the resulting rosette pattern.
A bead is threaded on a rigid frictionless rod. The rod rotates with constant angular velocity about a horizontal axis that is perpendicular to the rod and passes through a fixed point on it. Gravitational acceleration is .
i) (1 point) With suitable initial conditions, the trajectory of the bead is a circle. Sketch this trajectory in the plane perpendicular to the rotation axis, in a coordinate system with the axis at the origin.
ii) (1 point) Given that the trajectory is exactly a circle, find its radius.
iii) (2 points) The circular trajectory of the previous tasks is unstable. To stabilise it, one attaches a spring that produces a restoring force when the bead is displaced by along the rod from the axis of rotation. For what values of the stiffness can the bead move along a stable circular trajectory, and what is the radius of such a trajectory?
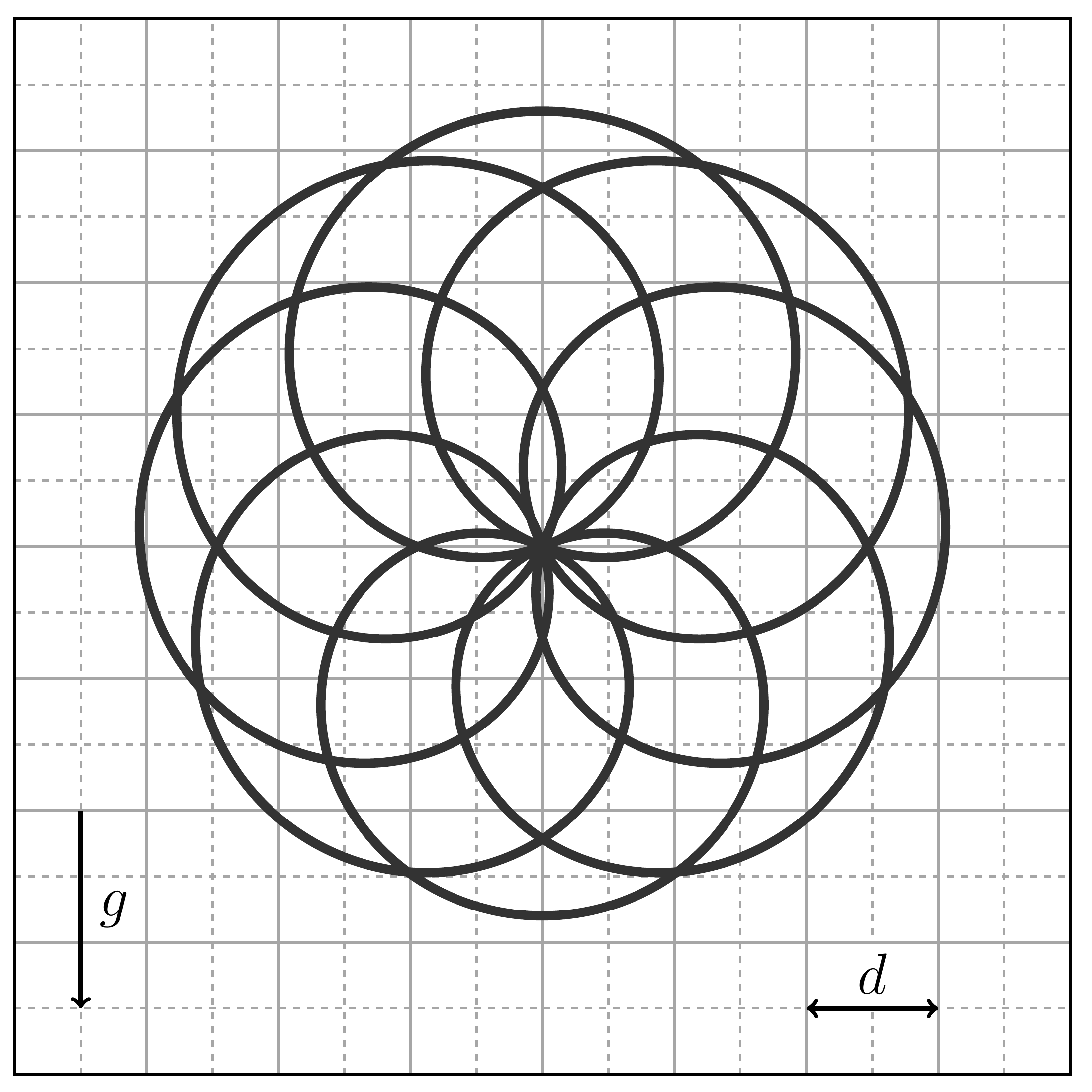
iv) (4 points) Next, the spring is removed, the bead is given a charge , and a uniform electric field of strength whose vector rotates with angular velocity in the same direction as the rod is introduced. With suitable initial conditions, the bead follows the trajectory shown below. Find , , and the ratio , where is the mass of the bead, in terms of and , the side length of the grid squares shown in the figure. You may take measurements from the figure.