Problem Set
NBPhO 2026
4. Rod and Bead 8 pts
A bead slides on a frictionless rod that rotates about a horizontal axis; identify the bounded circular trajectory generated by gravity, stabilise it with a Hooke spring, and reverse-engineer the parameters of a rotating electric field from the resulting rosette pattern.
Part i) (1 point)
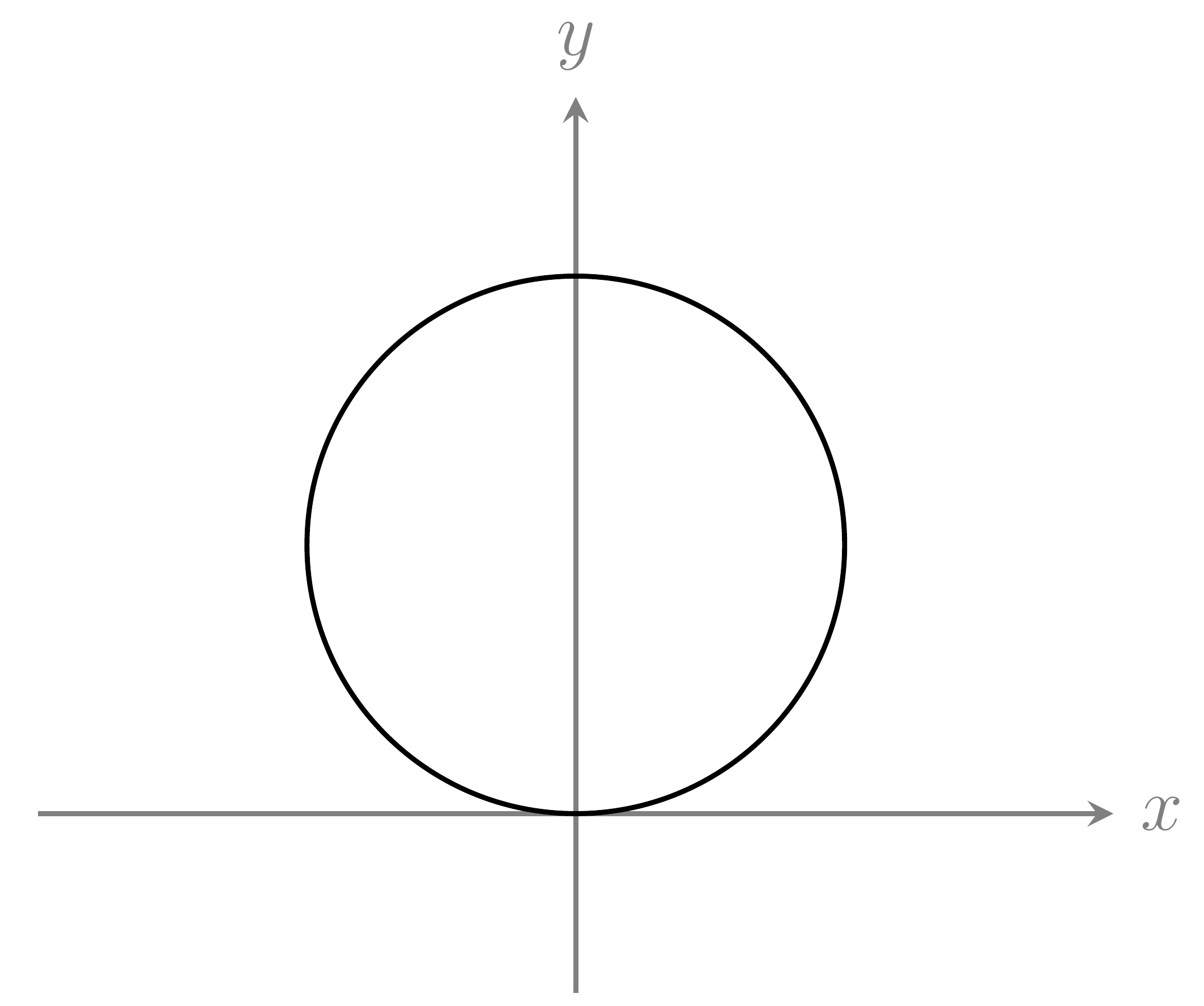
Solution 1 by Eero Ristolainen: The bead must pass through the origin (rotation axis). Otherwise, the bead would stay on “one side of the rod” and thus at the lowest point of the trajectory the force exerted by the rod couldn’t be entirely vertical, and thus it couldn’t be the lowest point. Hence, the bead must pass through the origin at the lowest point of the trajectory which corresponds to the rod being horizontal. This is enough to make a sketch: the path is a circle of radius centred at .
Solution 2: The plot can be made also from solution 4 of part ii.
Grading
- Correct sketch: 1 pts
- Otherwise correct sketch without axis: 0.5 pts
Part ii) (1 point)
Solution 1 by Eppu Leinonen: The bead’s velocity normal to the rod has to be the same as the rod’s velocity at that point for the bead to stay on the rod. At the topmost point the bead has no radial velocity. Thus, at the topmost point . On the other hand, at the topmost point (from Newton’s law) and from centripetal acceleration we can solve .
Solution 2 by Eero Ristolainen, Eppu Leinonen: The circular motion must be uniform as the bead performs uniform circular motion. A straight forward formal proof for this follows from the inscribed angle theorem. The angle of the bead measured from the centre of the origin is twice the angle measured from the origin at the circumference of the circle. The latter changes with speed as the corresponding straight line is the rod, thus the former must be . The centripetal acceleration on the bead is . At the topmost point, the speed is and the acceleration is only due to gravity and is . Thus .
Solution 3 by Eero Ristolainen: The centre of the motion is and the angular velocity is since the bead does a circle on both sides of the rod. Thus the coordinates of the bead with respect to time are
where is the location of the bead measured from the axis of rotation (and taking into account the direction). In the frame of the rod, the equation of motion is
since Coriolis force is perpendicular to the direction of motion which is counteracted by the rod. Substituting the above expression yields the answer.
Grading
- A valid argument for uniform circular motion with : 0.2 pts
- at the topmost point: 0.2 pts
- At the topmost point : 0.2 pts
- : 0.2 pts
- Correct answer: 0.2 pts
Solution 4 by Eppu Leinonen, Eero Ristolainen: Go to the corotating frame of the rod. Since the bead is moving in this rotating frame, it experiences a Coriolis force. However, it is directed perpendicular to the velocity which is limited to be along the rod. Hence, it does not affect the equation of motion of the bead and can be ignored. Let be the coordinate of the bead along the rod (with sign determining the direction). Then the equation of motion along the rod is
This gives an inhomogeneous second order linear differential equation
The general solution is a sum of the general solution to the homogeneous problem and any solution to the inhomogeneous problem. The homogeneous solution is
A particular solution we can guess by substituting . This gives an equation for as and thus . Thus the general solution is
which can only be periodic (in finite time) if , which determines the initial conditions (which there are only one) for the bead to have a circular trajectory. In the lab frame:
This is a circle of radius centred at (which gives the solution to part i as well).
Grading
- Correct equation of motion in the rotating frame: 0.2 pts
- States implicitly or explicitly that the general solution to the differential equation is the sum of the homogeneous and particular solutions: 0.2 pts
- Correct homogenous solution: 0.1 pts
- Correct particular solution: 0.2 pts
- States that homogeneous solution corresponding to periodic motion is 0: 0.1 pts
- Correct answer: 0.2 pts
Part iii) (2 points)
Solution 1 by Jaan Kalda, Eero Ristolainen, Eppu Leinonen: With the spring, the equation of motion becomes
This gives an inhomogeneous second order linear differential equation
The general solution is a sum of the general solution to the homogeneous problem and any solution to the inhomogeneous problem. The homogeneous solution is
A particular solution we can guess by substituting . This gives an equation for as and thus . Thus the general solution is
which can only be periodic (in finite time) if , which determines the initial conditions (which there are only one) for the bead to have a circular trajectory. In the lab frame:
This is a circle of radius centred at (which gives the solution to part i as well).
Stability. Perturbations from the periodic particular solution obey the homogeneous equation . If (i.e., ), this is simple harmonic motion at frequency — perturbations remain bounded, orbit is stable. If , perturbations grow exponentially — unstable. The stability criterion is
The centrifugal term acts as an effective destabilising stiffness , and the spring must overcome it.
As in solution 2 to part ii, we again look at the topmost point of the trajectory. The velocity is again , but now the acceleration is . Solving this gives . In the case the radius becomes negative, the circular trajectory simply appears below the origin, so we can take the magnitude of the radius above, giving the final result:
Grading
- Equation of motion including the spring: 0.2 pts
- Idea of looking at (small) displacements to analyse stability: 0.3 pts
- Identifying the homogeneous equation governing perturbations: 0.5 pts
- Correct stability criterion : 0.3 pts
- Correct equations for the acceleration and velocity at the top of the trajectory: 0.5 pts
- Correct radius formula : 0.2 pts
Solution 2 by Jaan Kalda (for finding the radius) The particular solution is again (as in solution 4 to part ii) :
The corresponding lab-frame orbit is, as in (b), a circle of radius , giving the result as in solution 1. For the amplitude is positive and the circle sits above the axis (as in parts a, b); at the driven amplitude diverges (driving resonance — the bounded circular orbit ceases to exist); for the amplitude is negative, meaning the circle flips to below the axis, but remains stable.
Grading
- Solving for particular-solution amplitude : 0.5 pts
- Correct radius formula : 0.2 pts
Solution 2 by Eppu Leinonen Alternatively following solution 4 of part ii, the general solution to this differential equation can be found. However, now the homogeneous solution is sum of real exponentials if which is unstable and a sum of sinusoid if which is stable. Then the particular solution can be guessed the same way as in the solution above.
Part iv) (4 points)
Solution by Eero Ristolainen and Eppu Leinonen
Now the equation of motion in the frame of the rod is:
Let us write as the angular velocity of the electric field in the frame of the rod. From the figure we see that is a sum of two periodic components . Furthermore, the linearity of the differential equation gives us that
The first one is fulfilled by the exact same solution as before (deduced the same way as in solution 2 of part), . We guess the second solution to be of the form , which gives .
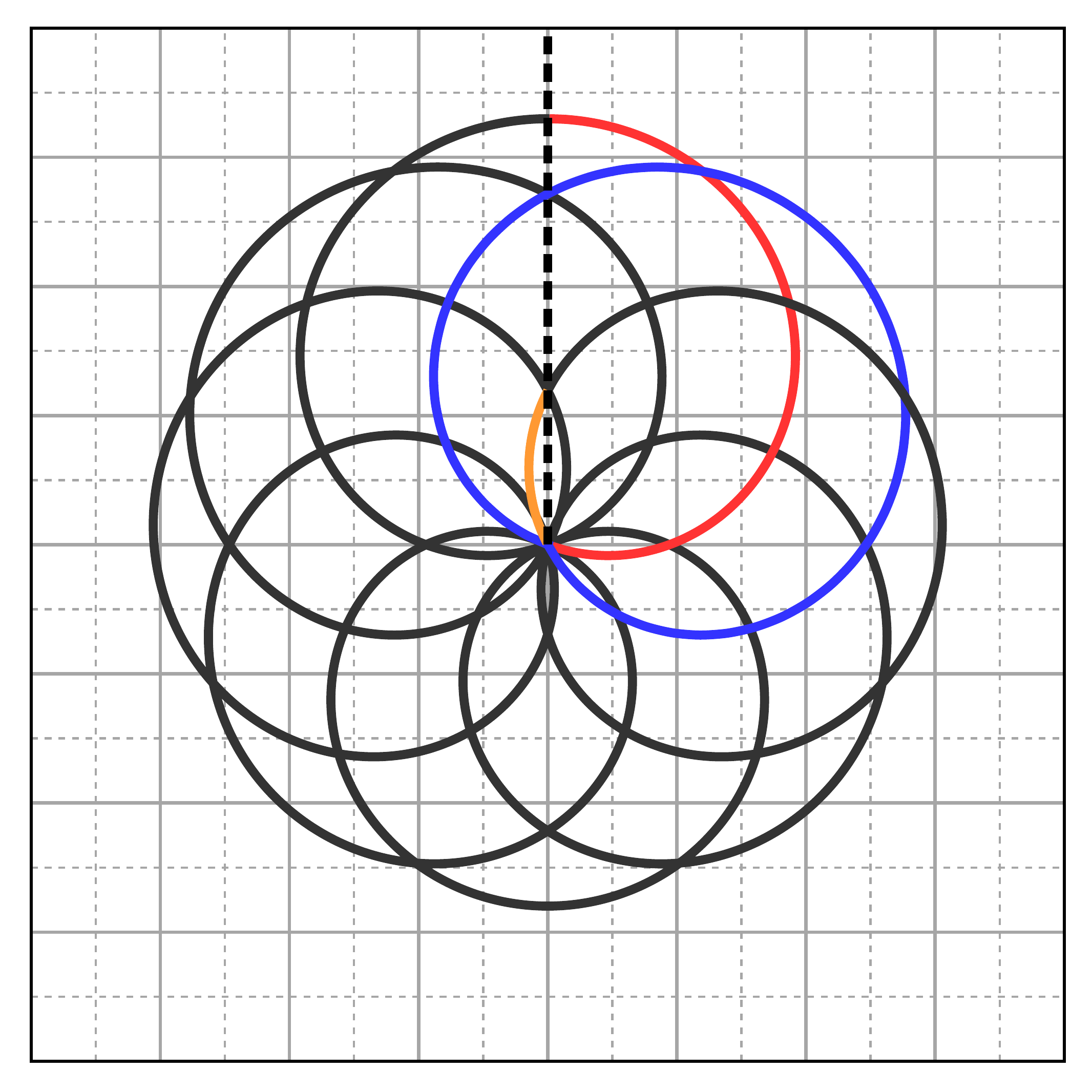
We see that the solution is periodic. Let this period be . Then we must have that with some positive integers and where and are the periods of and respectively. We notice that the figure is almost symmetric with respect to -axis, which is a huge deviation from the solution with just . Thus the amplitude of must dominate the one of . Therefore, the sign changes changes of corresponds to the loops in the figure which there are 8 of. Since the sine function has changes sign twice in a period, we get .
For the motion to reach the same ray (from origin, an example dashed in the figure below) twice, it takes time (the rod has made half a turn). From the graph, we can read that time (red + blue) the bead travels less distance than in (red+blue+orange). Similarly in time (red + blue + orange + the rest of the black to the horizontal axis) the bead travels more than in (red + blue + orange).
Thus we get the following inequalities
which gives
for which is the only solution. I.e. we get
(This can also be recovered from there being 4 loops corresponding to 5 -intercepts corresponding to the rod being vertical. This automatically gives .)
The symmetry with respect to reflection along the -axis in the figure (the trajectory is parallel to the -axis at the extremal points on the -axis) dictates that the electric field must point vertically when the bead is on the extremal points on the -axis. Thus, the corresponding displacements along these extremal -points must align constructively or destructively. I.e. the top-most and bottom-most distances from the origin correspond to the cases
(The formal justification is that at these extremal points and both contributions are proportional to a sinusoid, thus and are “orthogonal” at the same points. Thus, as gravity is parallel to the rod we have is at its extremum and thus . Thus and thus contribution from has to be at its extremum. This implies that the electric field points parallel and anti parallel to the rod at these extremal points. Now (due to both being orthogonal to ) and thus at these extremal points on the -axis, we have and .)
Measuring
and solving gives
Grading
- Equation of motion including the electric field: 0.1 pts
- Writing : 0.1 pts
- Deducing : 0.2 pts
- Guessing : 0.2 pts
- Finding : 0.2 pts
- Realising dominates with proper reasoning: 0.5 pts
- Noting periodicity: 0.2 pts
- : 0.2 pts
- Writing a restrictive enough inequality for (or ) from the figure (or any other procedure that works for finding ): 0.8 pts
- For a correct idea (in case it is executed wrong): 0.2 pts
- : 0.1 pts
- : 0.2 pts
- Deducing with reasonable explanation that electric field points along the -axis when bead reaches extremal : 0.5 pts
- Writing and as the difference/sum of the and amplitudes: 0.3 pts
- Solving for and : 0.1 pts
- and : 0.3 pts
- 0.1pt for one correct.
- , .