Problem Set
NBPhO 2026
3. Kirill on a Swing 8 pts
A child on a rigid-rod swing parametrically pumps the amplitude by squatting at turning points and standing up at the bottom; count the stand-ups required to go over the top.
Part i) (1.5 points)
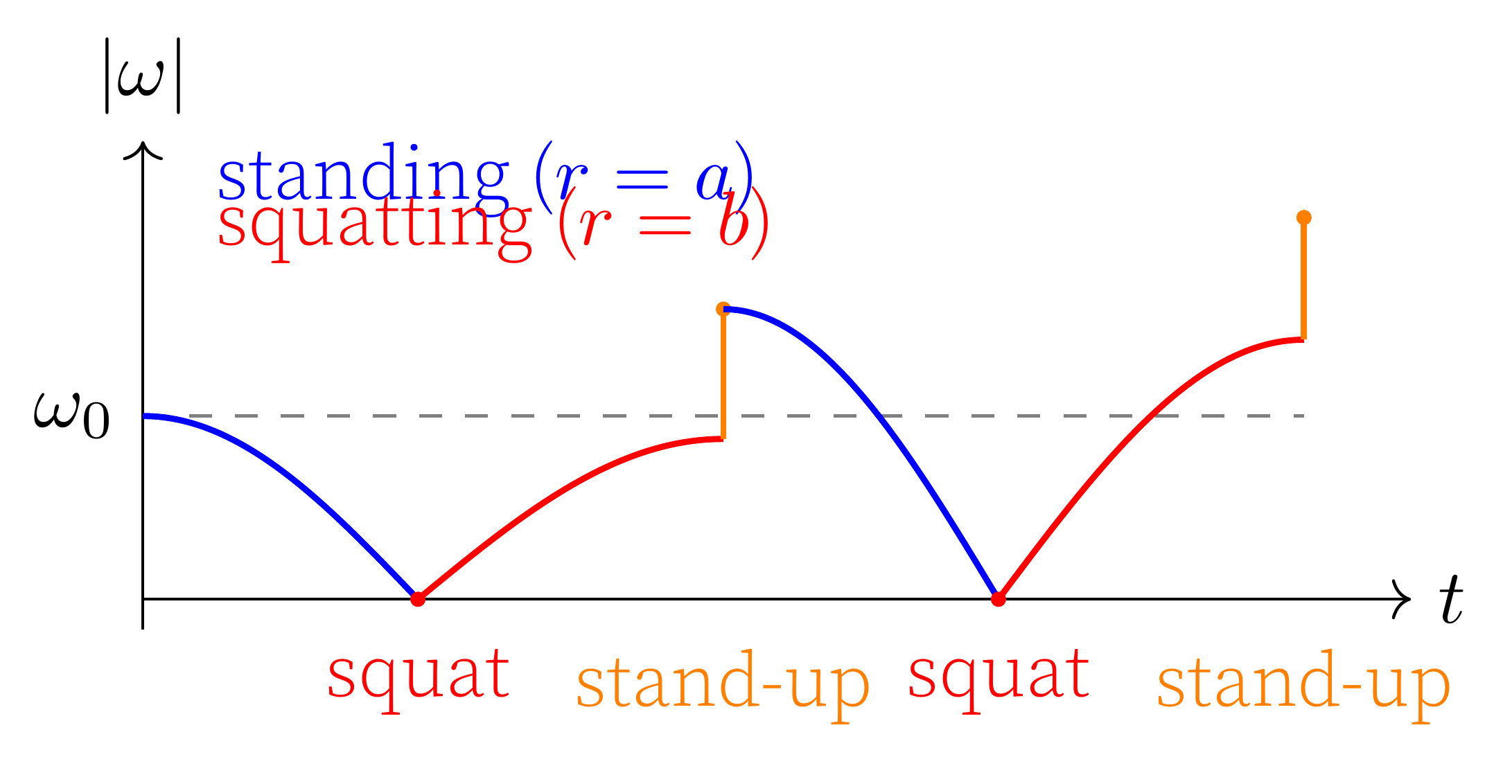
Starting at the bottom with , Kirill (standing, radius ) swings up; falls smoothly to at the turning point, after a quarter-period . At the turning point Kirill squats (radius , no effect on the plot since ). Swinging back while squatting, rises smoothly from to (see part c; ) after a quarter-period , which is longer than the first since . At the bottom Kirill stands up: jumps from to . The second half of the period repeats the pattern with new amplitudes , , .
The sketch should therefore show:
- smooth arches during swinging, cusps at the bottom (jumps) and smoothness at turning points;
- the “squatting” arches taking longer than the “standing” ones;
- growth of successive peaks.
Part (i): Angular speed vs time, first full period.
Part ii) (2 points)
The trajectory in the plane pieces together arcs of pendulum-like phase curves at two radii, and . Each half-swing traces an arc of the energy conservation curve for the relevant radius. Stand-ups at appear as vertical segments where jumps from to . Squats at the turning points () appear as smooth transitions (the radius- arc meets the radius- arc tangentially at ).
The motion is an outward spiral: each full cycle brings Kirill back to with a larger . When at the bottom (standing, radius ) first exceeds , the next upward arc does not close: it reaches with and continues past from there. This is the open curve on the sketch. Part (ii): Phase diagram ( vs ), first three half-swings.
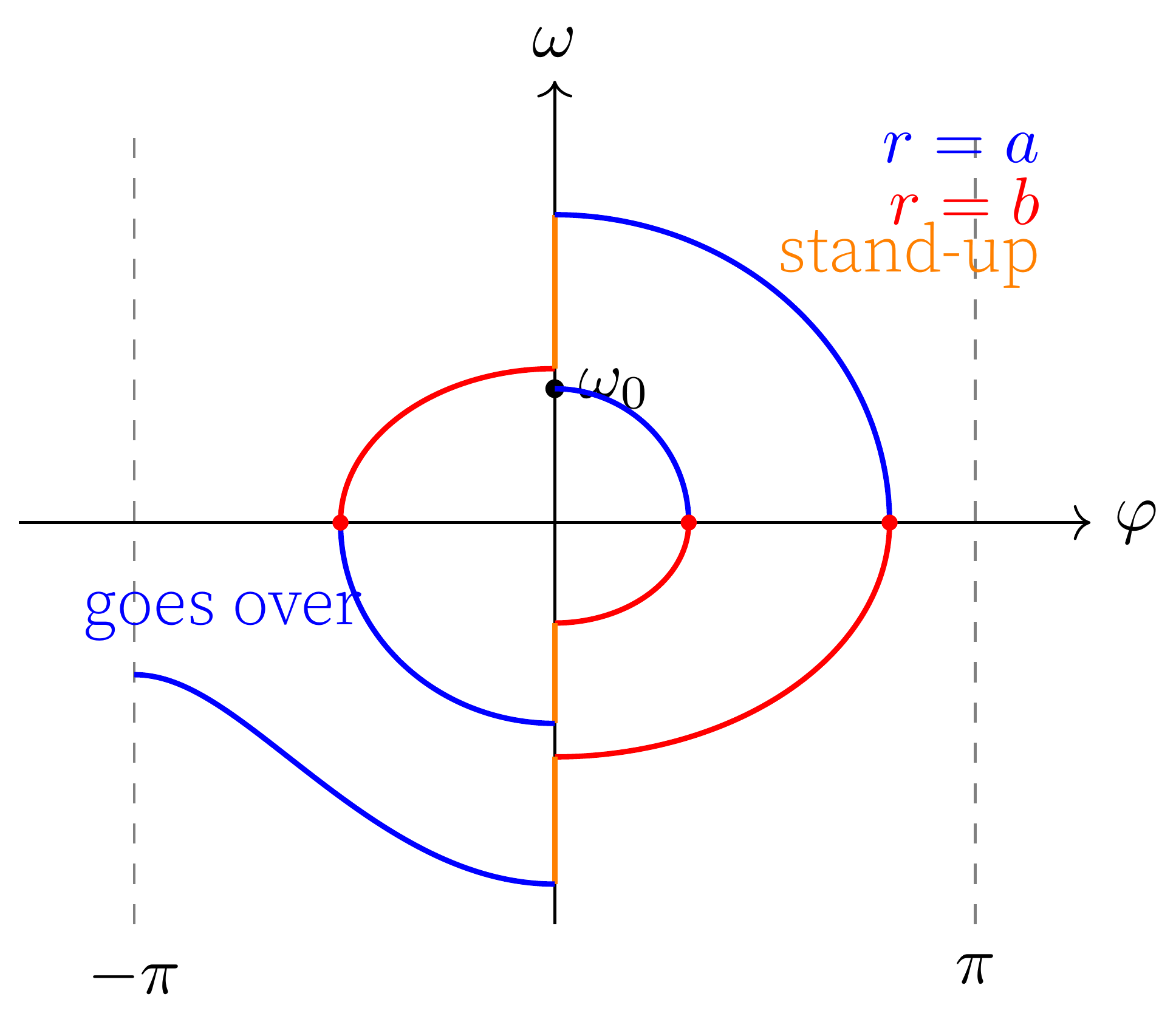
Key features for grading:
- lens-shaped/pendulum-like arcs (not ellipses);
- vertical line segments only at (stand-ups), smooth meeting at turning points (squats);
- spiral grows outward;
- final open curve goes over the top with non-zero .
Failure to use the phase diagram of angular velocity and angle, deducts 0.5 pts from the sum of part ii).
Grading (part i and ii)
- Approximately sinusoidal arcs between jumps: 0.3 pts
- Instantaneous jumps at the maximum values of (at the bottom of the swing, during the stand-up): 0.6 pts
- Smaller amplitude during “squatting” arches, or equivalently a longer quarter-period while : 0.3 pts
- Overall growth of peak over the period: 0.3 pts
A sketch of signed (rather than ) receives full credit if the curve correctly corresponds to the axis labels and all other qualitative features are preserved. Failure to correctly mark , where necessary, deducts 0.5 pts. The same goes for not completing the full period of the first swing.
Part iii) (4.5 points)
Growth factor per stand-up. Let denote the angular velocity just after the -th stand-up (at the bottom, standing, radius ); let denote the angular velocity just before that stand-up (at the bottom, squatting, radius ).
Energy conservation on the way up (standing, radius ) to turning point at angle :
At the turning point , so the squat () leaves and unchanged. Swinging back down (squatting, radius ):
Equating: . The stand-up is a purely radial motion, so angular momentum about the pivot is conserved: , whence
After stand-ups, .
Minimum angular velocity for a loop. The rods are rigid, so the condition for reaching the top is simply that the kinetic energy at the bottom suffice to raise Kirill by :
Counting. Kirill first loops over when , i.e.
Numerical evaluation. With , , , :
Check: (just short); (exceeds ). So Kirill loops over on the swing-up following his sixth stand-up.
Grading (part c)
- Angular momentum conservation during the stand-up: 0.7 pts
- Energy conservation during the swing: 0.7 pts
- Growth factor per stand-up: 0.7 pts
- Minimum angular velocity for the rigid-rod swing to loop over the top: 0.8 pts
- Correct inequality for the over-the-top condition ( after the th stand-up): 0.4 pts
- Solving the inequality for using the growth law , yielding : 0.7 pts
- Numerical answer : 0.5 pts